全国服务热线
全国服务热线





19926637039
一、MR1不锈钢软缆式磁致伸缩位移传感器概述:
在铁磁质中磁化方向的改变会引起介质晶格间距的改变,从而使得铁磁质的长度和体积发生改变,即:磁致伸缩现象,也称为威德曼效应,其逆效应称为维拉里效应。
磁致伸缩位移传感器的原理是利用两个不同磁场相交时产生一个应变脉冲信号,然后计算这个信号被探测所需的时间周期,从而换算出准确的位置。这两个磁场一个来自磁环中的永磁铁,另一个来自传感器电子仓中的电子部件产生的激励脉冲。激励脉冲沿传感器内用磁致伸缩材料制造的波导丝以声速运行。当与磁环中的永磁场相交时,由于磁致伸缩现象,波导丝产生的机械振动形成一个应变脉冲。应变脉冲很快便被电子仓中的感测电路探测到。从产生激励脉冲的一刻到应变脉冲被探测到总的时间乘以固定的声速,我们便能准确的计算出磁铁的位置变化。这个过程是连续不断的,所以每当磁环位置改变时,新的位置会被迅速测量出来。由于输出信号是真正的位置值,而不是比例的或需要再放大处理的信号,所以不存在信号漂移或变值的情况,更不必像其他传感器那样需要定期重标。
磁致伸缩传感器为非接触式,永不磨损。具有高分辨率、高精度、高稳定性、高可靠性、响应时间快、工作寿命长等优点。传感器不用重新标定,也不用定期维护。
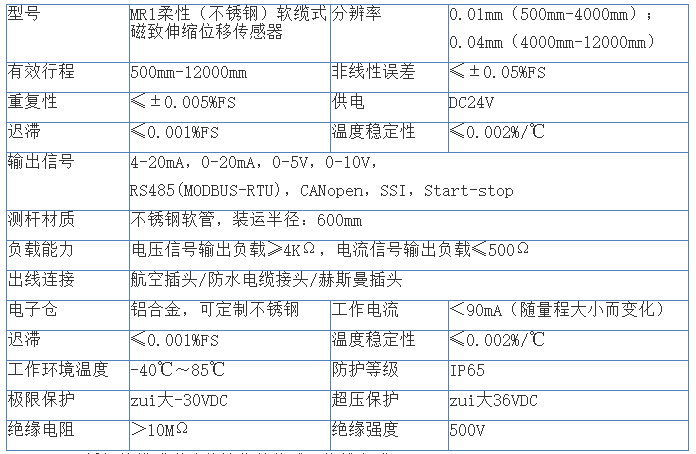
二、MR1不锈钢软缆式磁致伸缩位移传感器技术参数:
三、MR1不锈钢软缆式磁致伸缩位移传感器接线方式:
1.防水接头接线方式(RS485(MODBUS-RTU)信号输出):
传感器共有五个接点:正电源(棕)、电源地(黑)、RS485A(蓝)、RS485B (白)、壳体地(屏蔽线)
2.航空插头接线方式(RS485(MODBUS-RTU)信号输出):
传感器共有五个接点:①正电源(棕)、②电源地(黑)、③RS485A(蓝)、④RS485B (白)、⑤壳体地(屏蔽线)
3.防水接头接线方式(SSI信号输出):
传感器共有五个接点:正电源(棕)、电源地(黑)、时钟正(绿)、时钟负(白)、数据正(红)、数据负(黄)、壳体地(屏蔽线)
4.航空插头接线方式(SSI信号输出):
传感器共有五个接点:①正电源(棕)、②电源地(黑)、③时钟正(绿)、④时钟负 (白)、⑤数据正(红)、⑥数据负(黄)、⑦壳体地(屏蔽线)
5.防水接头接线方式(CAN open信号输出):
传感器共有五个接点:电源正(棕)、电源负(黑)、CAN-H(蓝)、CAN-L(白)、接地(屏蔽线)
6.航空接头接线方式(CAN open信号输出):
传感器共有五个接点:①电源正(棕)、②电源负(黑)、③CAN-H(蓝)、④CAN-L(白)、⑤接地(屏蔽线)
四、MR1不锈钢软缆式磁致伸缩位移传感器应用领域:
伺服液压油缸活塞位置预置和反馈,伺服气缸活塞位置预置和反馈,研磨机械位置预置和反馈,铸造锻压机床位置预置和反馈,其他机械如龙门机床位置预置和反馈,掘进机、盾构机、煤矿机械油缸位置预置和反馈,工程提升机械油缸位置预置和反馈,轧钢机等钢厂机械油缸位置预置和反馈,吹瓶机油缸位置预置和反馈,注塑机械油缸位置预置和反馈,铁路、桥梁的调节,水位的检测、水闸的控制,木材机械位置预置和反馈,油缸液位的位置预置和反馈,化工容器液位的位置预置和反馈,饮用水和污水处理系统,大地测量系统,闸门开度的位置预置和反馈,油缸液位的测量。
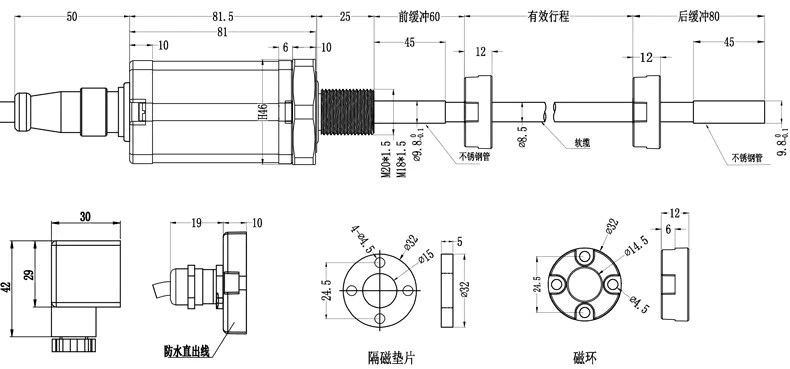
五、MR1不锈钢软缆式磁致伸缩位移传感器安装尺寸图:
六、MR1不锈钢软缆式磁致伸缩位移传感器选型: